



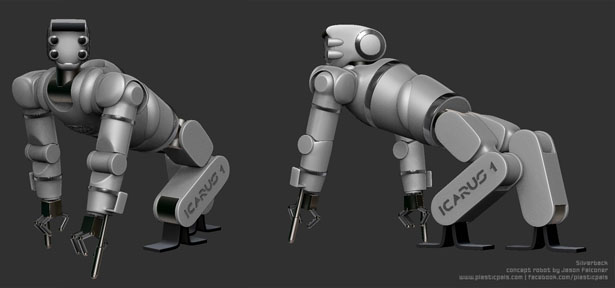
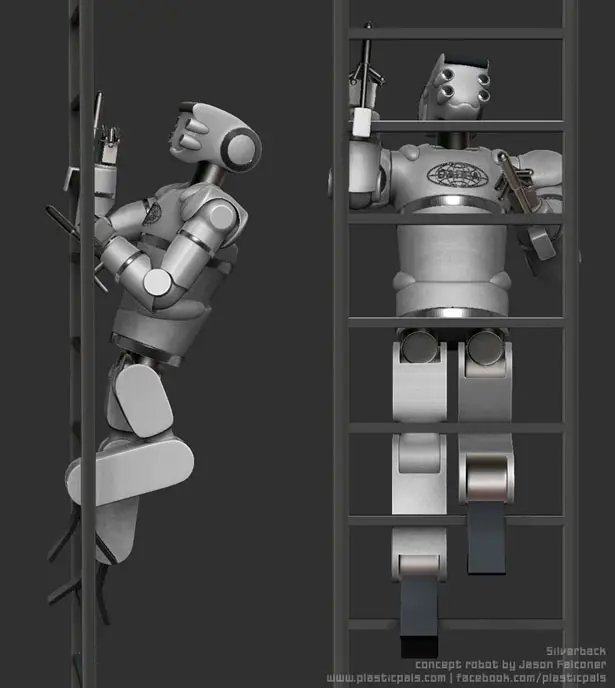
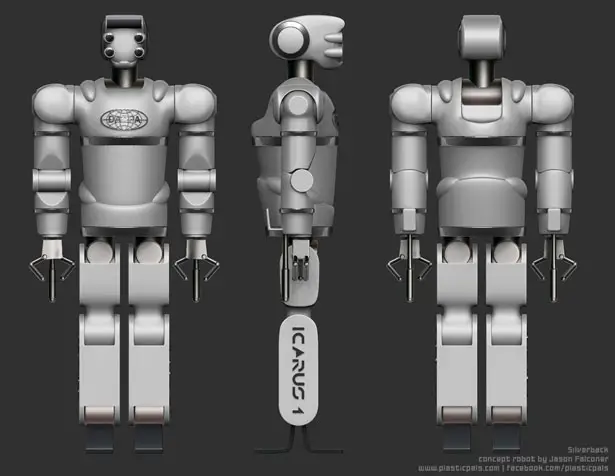
Silverback robot is a conceptual robot designed by Jason Falconer for Icarus Technology’s bid to enter DARPA’s Robotics Challenge. The challenge (slated for 2014) will require a robot to drive a vehicle, open doors, climb ladders, and use power tools (among other tasks). While most of the robots entering the challenge will likely be humanoid in design, Icarus Technology felt that an ape-like robot would work best. It is able to stand up like a person, but can also walk on all fours for better stability on rough terrain.
To do this, the Silverback robot requires stilts on its arms to prevent injury to its hand mechanisms. It also walks with inverted knees on flexible but strong carbon fiber planks similar to those used in prostheses for athletic amputees, which is a fairly unusual method for robots.
Designer : Jason Falconer

Tuvie has received “Silverback Robot” project from our ‘Submit A Design‘ feature, where we welcome our readers to submit their design/concept for publication.


