



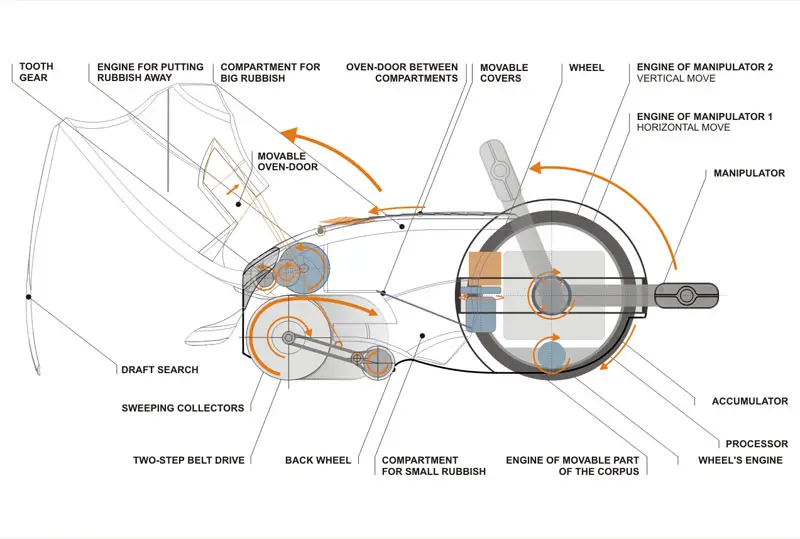
The Robot Harvester is a self driven robot concept that has been designed to gather rubbish from shopping centers and street territories, and put them to the right place for disposal. Not only the small rubbishes, the Robot can gather big rubbishes as well using manipulators. It features two web cameras and sensors to detect length of an element which will help it to estimate the territory and locate the place where the rubbish is awaiting to be picked. The scope of small rubbishes is created through a couple of diagonal sweeper-collectors that can sweep just near to the edge.

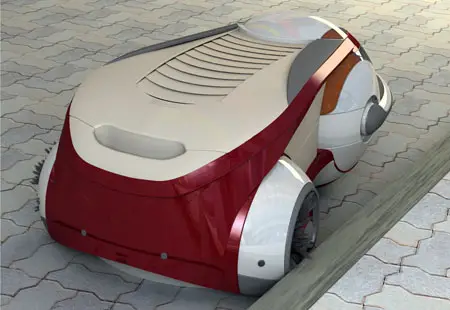
After sweeping, the rubbish is dumped inside the tank which is divided into two parts: one for small rubbish and another for bigger one. Big rubbish are put by manipulators and falls through upper hole, that is closed with plates. The plates work using the principle of jalousie from small serve drive. All rubbish will be put away from the robot automatically, and its tank can be put away for washing. Recharging of accumulators is automatic too.



More images:




Designer : Olga Kalugina
*Some of our stories include affiliate links. If you buy something through one of these links, we may earn an affiliate commission.



Make this larger IE truck size, how cool
Automated Self drive dumpsters
(sorry Teamsters- Hi Tech automation)
I agree with stephen russell to be honest. Maybe not AS big as a dump truck but maybe about the size of sweepers that go up and down the pavements cleaning. Maybe this could be an equivalent or replacement.
What are you advising people to do? ,
i really admire this design,
Really great design.